1前言 2测量仪的组成 测量仪由工作平台、测量平台、步进电机A、B、C位移传感器及滑座、计算机检测控制组成如图1所示。 测量时,被测工件放在工作平台上,根据被测工件尺寸大小,计算机检测控制系统根据予置参数进行自动调节位移传感器与被测工件高度;调节位移传感器与被测工件的左右位置;调节位移传感器测头绕其旋转中心的旋转角度,从而实现圆弧半径R的自动测量。
3测量仪的测量原理 图3为内径测量原理图,当位移传感器测量被测圆弧面上A点时,可测到一个位移测量值QA;当位移传感器测旋转中心Q点旋转α角后在被测工件圆弧面上点可测得QB值;当位移传感器绕测台旋转中心Q点旋转β角后,在被测工件圆弧面上C点可测得QC值。此时由AB、BC、AC构成一个圆的内接三角形ABC。在QAB中由三角形余弦定理可得: 式中QA、QB、QC、α。β――直接测出,同时把(5)式(7)式代入(8)式中,即可计算出圆弧半径R值。
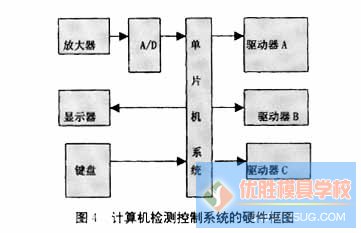
4计算机检测控制系统的硬件电路 计算机检测控制系统硬件框图如图4所示,由计算机系统、放大器、A/D转换器、驱动器A、B、C,显示器和键盘组成。放大器接位移传感器,驱动器A、B、C分别接步进电机A、B、C,单片机系统为整个测量仪的控制中心。位移传感器检测值通过放大后,进行A/D转换,变成数字信号送入单片机系统(QA、QB、QC的长度值)。步进电机A、B、C根据单片机发出信号,分别由驱动器A、B、C进行驱动后旋转,调节位移传感器和被测工件距离和测头角度,显示器可显示测量QA、QB、QC、R值和测头旋转角度α、β值,键盘用于予置α、β值,测量组数n和位移传感器与被测工件距离。 5测量仪程序框图 测量系统的程序框图如图5所示,测量前根据被测工件的尺寸予置步进电机A、B、C的移动距离,位移传感器测头绕旋转中心旋转的角度αiβi(i=1,2,3…,n),n-测量组数),参数予置完成后系统开始测量,测完一组(3次)后,计算出R值存贮并显示,当n组数据全部测完后,求出R的平均值。 6结束语

该测量仪利用计算机控制步进电机A实现位移传感器左右移动;步进电机B实现测量平台上下移动;步进电机C实现位移传感器测头旋转并检测位移传感器的测量数据。